This project was developed in a group for CS598 Digital Agriculture at the University of Illinois at Urbana-Champaign.
In the field of agricultural robotics, autonomy promises to revolutionize farming. From precision planting to automated harvesting, there are many reasons to pursue autonomy on the farm. There are two major paradigms in this space: having a few large and expensive tractors, or many small and cheap robots. Companies like John Deere and Sabanto pursue the large tractor model, while smaller startups and research typically focuses on smaller robots.
For the researchers, the small robot approach presents a dilemma. When a robot enters a field of high-growth crops, it enters a GPS-denied environment. The dense canopy acts as a natural shield, scattering satellite signals and leaving conventional navigation systems blind. To solve this, we developed a radar-first SLAM (Simultaneous Localization and Mapping) pipeline designed to provide high-fidelity positioning where other sensors fail.
The GPS-Denied Dilemma

The Solution
To give our robot this known global location, we developed a radar-first SLAM pipeline. SLAM is widely used in autonomy, so it was a natural choice for us. However, a very important consideration was our sensor. In an agricultural context, we cannot rely on typical SLAM sensors like LiDAR or cameras due to the potential for dust, fog, rain, or vegitation to occlude the sensors. We decided to use mmWave Radar due to its ability to remain useful in these conditions. As an added benefit, it would even work at night!
The Pipeline
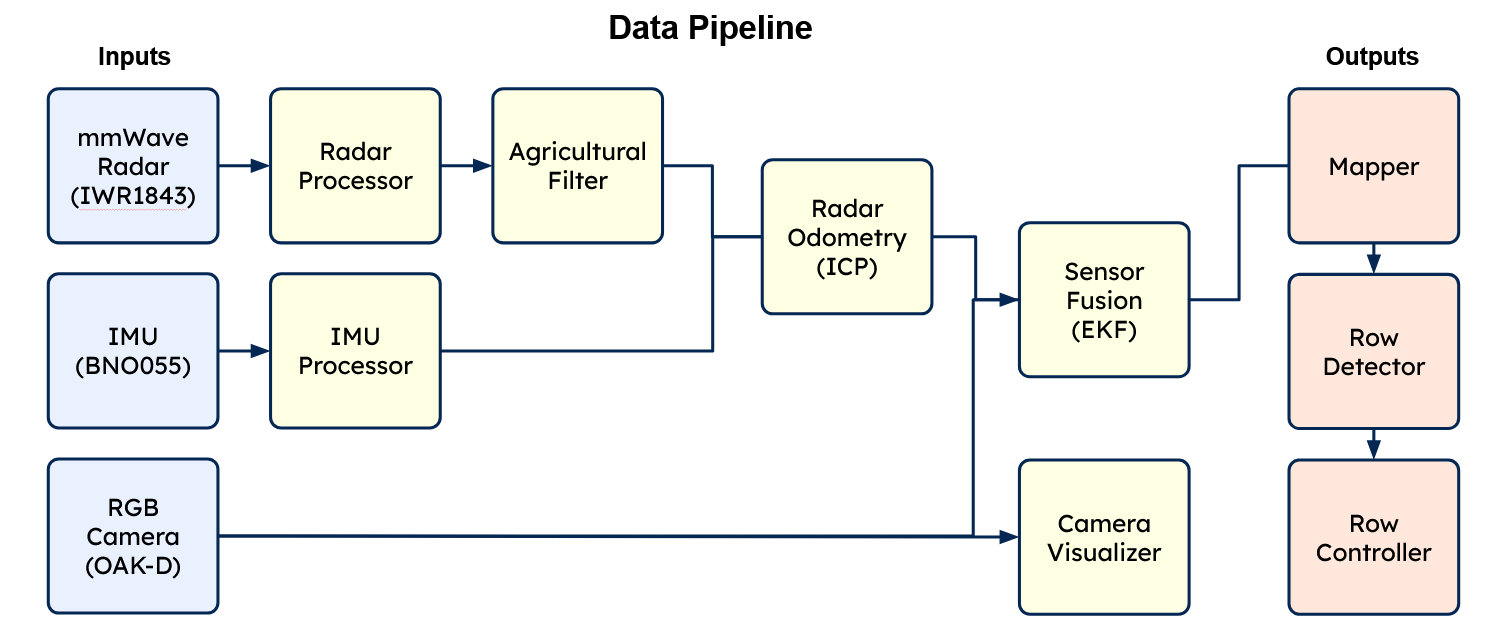
- Radar Signal Processing: We converted raw ADC samples into a range-Doppler map, using a Capon spatial spectrum for precise azimuth estimation.
- Point Cloud Filtering: In a crop canopy, many radar returns come from moving leaves and thin stalks. To filter these out, we use Doppler-based static/dynamic seperation. Points that move faster than some threshold are ignored.
- Radar Odometry (ICP): We aligned consecutive scans using a 2D Iterative Closest Point (ICP) algorithm. This provided a dead-reckoning stream that stayed stable even when the ground was uneven.
- Sensor Fusion (EKF): We fused the radar odometry with high-frequency IMU data using an Extended Kalman Filter (EKF) to ensure smooth transitions and high-fidelity heading data.
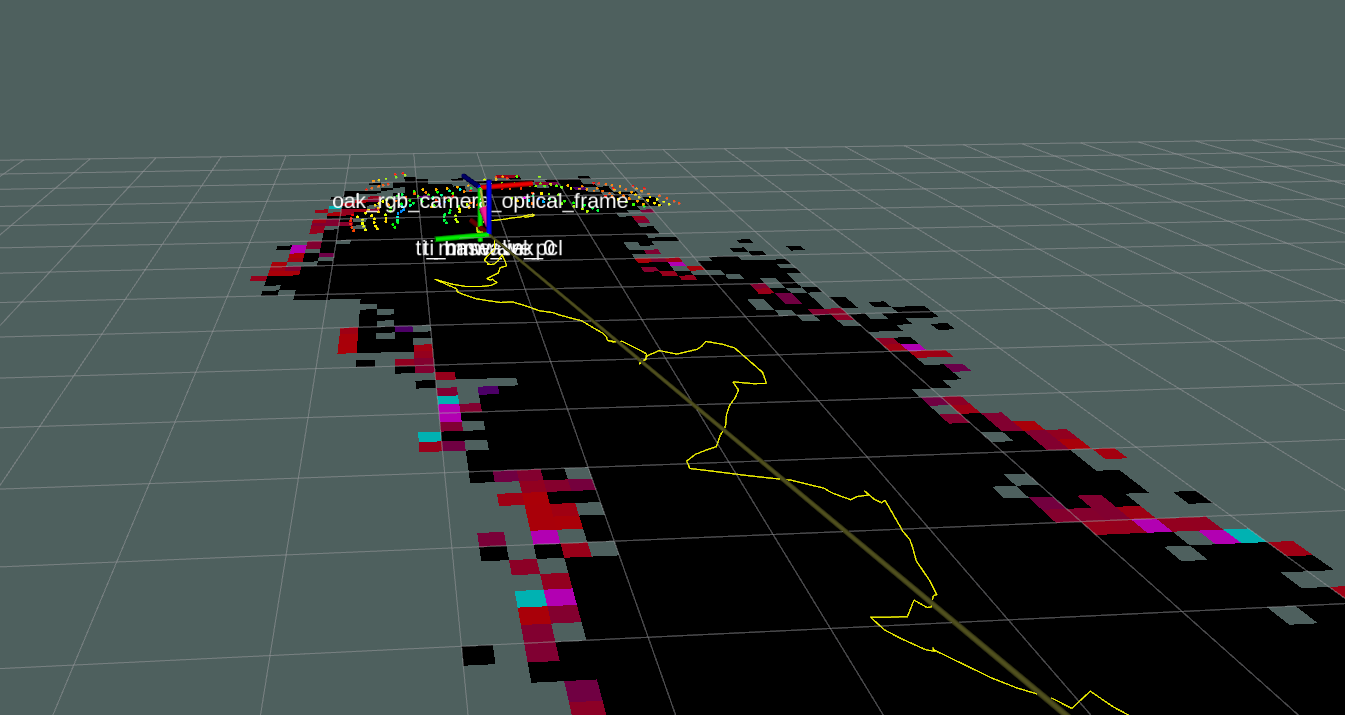
- Occupancy Mapping: The final output was a global Log-Odds Occupancy Grid, which was then used for real-time row detection and path planning.
The result of this pipeline is that the robot was able to follow the row geometry without any obvious drift over a typical row of crops. As expected, it also performed well with obstructions and in low light.
Future Work
Although the performance was visually good, we were not able to get ground truth path to comparea against. We can integrate a GPS signal to acompilsh this. In addition, we only used an IMU for additional sensors. We can integrate wheel odometry, camera, and LiDAR as well to improve our movement estimation.